
xx autobideko Zhongtang zubiak 32,5 + 4 × 45 + 32,5 m-ko zabalera nagusia eta sekzio berdineko hormigoi armatu aurretensatutako kaxa jarraiko habea (tenkatze osteko metodoa), guztira 245,9 m-ko luzera du. Kutxa-habea gela bakarrekoa da, habearen altuera erdian 308,25 cm-koa da, teilatuaren zabalera 1100 cm-koa da (zubi-oholaren zabalera 12 m-koa da) eta beheko plakaren zabalera 480 cm-koa da. Sarea inklinatua da, eta goiko plakan erdiko distantzia 570 cm-koa da. Habearen muturrak eta habe osoaren erdialdea habez hornituta daude, eta gainerakoak 15 m-tik behin diafragmaz hornitzen dira.
Zubi nagusiaren kai-zimentazioa 120 cm-ko diametroa duten 4 pila zulatuak dira, hondoan 50 cm baino gehiagoz txertatuta daudenak. Kaiaren gorputzak 180 cm-ko diametroa duen hormigoi armatuzko zutabe biko egitura hartzen du.
Zubia altxatzen denean, SSY metodoa aplikatzen da, hau da, puntu anitzeko bultzada metodoa erabiltzen da habea altxatzeko. Metodo honen ezaugarriak hauek dira: habearen gorputza bultzatzean (tiratzean) erreakzio-indar horizontala barreiatzen da eta kai bakoitzean eragiten du, eta bultzada (tira) eragiketa zentralki kontrola daiteke. Lanean zehar behin-behineko zulorik ez dagoenez, kaxa-habearen aurrealdeko muturra 30 m-ko luzerako fabrikatutako altzairuzko truss bati lotuta dago habe gidari gisa.
Aurrefabrikatutako kaxa-habea gora bultzatzen denean, ziklo batean egiten da aurreratzea → habe altxatzailea → habe erortzailea → propultsioa. 1. irudiak ziklo baten kasua erakusten du.
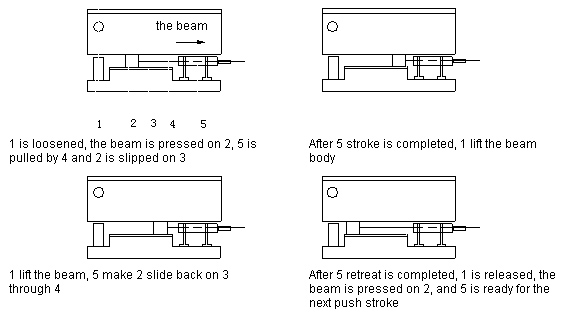
Bultzatzeko prozeduraren eskema
1——Zilindro bertikala;2——Arrastatu Burua;3——Slideway;4——Pulling Rod;5——Hzilindro orizontal
Ikusten denez, programa-ziklo hori gauzatzeko, zilindro horizontalak kaxa-habea lerratze-gailuan zehar bultzatzeko ekintza osatzen du, eta zilindro bertikalak habea altxatu eta erortzeko ekintza osatzen duela. Hau da, zilindro horizontala eta zilindro bertikala txandaka jarduten dira.

1. Puntu anitzeko habe bultzatzailearen eta haren kontrolaren sistema hidraulikoa
Zilindro horizontala eta zilindro bertikala hidraulikoki gidatzen dira eta elektrizitatearen bidez kontrolatzen dira. Zubirako bultzatu beharreko kaxa-habearen luzera guztira 225 m-koa da, eta metro lineal bakoitzak 16,8 t-ko pisua du, guztira 3770 t inguruko pisua duena. Beraz, guztira 10 zilindro horizontal eta 24 zilindro bertikal (olioaren presioa 320kg/cm2-koa da eta irteera 250t-koa) antolatzen dira. 5 kai daude zilindro horizontalekin, 2 kai bakoitzeko; 6 kai daude zilindro bertikaletarako, 4 kai bakoitzeko.
Jack bertikalak habearen altxatzea eta jaistea osatzen du. Eraikuntza-prozesuan, zubi osoa ez da sinkronizatu behar, eta kaiak banatu behar dira, beraz, ez dago kontrol zentralizatuko arazorik. Bere kontrol elektrikoak jack-aren etengabeko altxatzea edo jaistea osa dezake, eta jog formularioa ere osatu dezake.
Jack horizontalak habea bultzatzeko ekintza osatzen du. Eraikuntza-prozesuak zubi osoa sinkronoa izatea eskatzen du, hau da, irteera edo aldi berean gelditzea, beraz, jack horizontalaren kontrol zentralizatua ezartzen da, eta horretarako kontrol zentralizatuko kaxa elektriko bat ezartzen da.
Pixkanaka-pixkanaka kate horizontalen eta bertikalen erabilera areagotzen ari da, eta kaxa-habea ziklo bakoitzeko 15 m aurrefabrikatzen da. Kutxa-habearen etengabeko hazkuntzarekin, pixkanaka-pixkanaka handitzen da erabilitako kate kopurua. Aurrefabrikazioaren azken zikloetan, 10 multzo horizontalak eta 24 bertikalak erabiltzen dira.
Kai bakoitza kontrol-gela zentralizatuarekin konektatzeko, interfono soinu-transmisio-sistema bat jarri genuen. Praktikak frogatu du goian aipatutako transmisio-sistema hidraulikoa eta kontrol-metodoak erabiltzeko fidagarriak direla.
Hitz egin dezagun erreferentziarako push frame habe metodoaren transmisio hidraulikoaren hainbat arazoren esperientzia batzuei buruz.
1. Sistema hidraulikoaren presio mailakatuaren erregulazioaren arazoa. Urratsez urratseko presioa erregulatzeko arazoa kaxa-habea mugitzean marruskadura-erresistentzia estatikoa eta marruskadura-erresistentzia dinamikoa kontuan hartzen direlako planteatzen da. Iraganean, sistema hidraulikoak bizpahiru olio-presio izan behar zituela uste zen beti: marruskadura estatikoa erresistentzia gainditzen denean, olio-presio handiagoa erabiltzen da; eta kaxa-habea irristatzen denean olio-presio txikiagoa erabiltzen da. Metodoa sistema hidraulikoa aldatzea da, ezarri diren erliebe balbula desberdinak konektatuz. Horrela, sistema hidraulikoa eta haren kontrola apur bat konplikatuagoak dira. Gure praktikak frogatu du sistema hidraulikoaren olio-presioa ez dela bere buruaren araberakoa, jack-aren kanpoko erresistentziaren araberakoa baizik. Hau da, sistema hidraulikoa funtzionatzen ari denean, bere olioaren presioa ez da olio-ponparen plakan dagoen kantitatearen arabera zehazten, baizik eta ponpatik irten ondoren olioa olio-tangara itzultzean aurkitutako erresistentzia osoaren arabera. . Jackak erresistentziarik (karga) ez badu, olio-ponparen presioa hodiaren erresistentziaren arabera bakarrik zehazten da; olio-ponparen olioa berehala atmosferara edo olio-tanga sartzen bada, olio-ponparen presioa zero izango da; jack-aren R erresistentzia (karga) handitzen bada, olio-ponparen presioa ere handitu egiten da. Jacka deskargatzen denean, olio-ponparen presioa norabide bakarreko balbulak zehazten du; jack-a kargatzen denean, olio-ponparen presioa, hau da, sistemaren olio-presioa, jack-aren erresistentziaren arabera zehaztuko da. Laneko olioaren presioa jack kargaren arabera zehazten da. Hau da, sistema hidraulikoaren olio-presioa kanpoko erresistentziarekin aldatuko da, beraz, urratsez urrats presioa erregulatzea ez da beharrezkoa.

2. Jack horizontalen sinkronizazioa. Bultzatze-prozesuak ezkerreko eta eskuineko jack horizontalek habea abiadura berean bultzatu behar dute, bestela, habea desbideratu egingo da irrist egiten duenean. Jakina, jendeak kontuan hartzen duen lehenengo gauza da ezkerreko eta eskuineko jack horizontalek habearen gorputzari aplikatutako indarra berdina izan behar dela, eta hori zuzena da. Beam gorputzaren ezkerreko eta eskuineko simetria bikaina denean eta erresistentzia ezkerreko eta eskuinekoaren berdina denean, noski, ezkerreko eta eskuineko jack horizontalek aplikatutako indarra berdina izan behar da. Bigarren kontua da ezkerreko eta eskuineko aurrerako abiadurak ere berdinak izan behar direla. Horrela, habea leun eta zuzen ibili daiteke. Dena den, zaila da habe-gorputzak ziurtatzea atal bakoitzak ezkerreko eta eskuineko alde guztiz simetrikoa izan behar duela eta ezkerreko eta eskuineko erresistentzia berdina izan behar duela. Goian aipatutako sistemari lotutako olio-presioa kanpoko erresistentziaren arabera zehazten da. Pentsa daiteke ezkerreko eta eskuineko jackek olio-presio baldintza desberdinetan funtzionatu behar dutela, beraz, ezkerreko eta eskuineko jacken abiadura sinkronizatuko al da une honetan? Ilustrazioaren mesedetan, kai bateko jack-pare bakarra dabilela suposatzen da. Ponpa bat jack batekin ezarri dugunez, honek abiadura sinkronizatzeko arazoa oso ondo konpontzen du. Erabiltzen dugun olio-ponpa desplazamendu positibo-ponpa kuantitatibo bat denez, teorian, olio-ponparen irteerako olioak zenbat erresistentzia duen (hau da, sistemaren olio-presioa zenbaterainokoa den ere), bere emaria da. aldatu gabe. Hori dela eta, ezkerreko eta eskuineko jakak sinkronizatu behar dira. Noski, ondorio hau lau gailurreko bi kai, sei gailurdun hiru kai, zortzi gailur dituzten lau kai edo hamar gailurreko bost kairen egoerari ere ondoriozta daiteke. Hori dela eta, ponpa baten eta goiko baten metodoa hobeto konturatu daiteke ezkerreko eta eskuineko sinkronizazioaren arazoa. Praktikak ere frogatu du bultza-habean, kaxa-habearen erdiko lerroa, funtsean, ez dela desplazatua (esan bezala, ezkerretik eskuinera zertxobait desplazatuta egon beharko litzateke, baina beti tarte jakin batean mantendu daiteke). Eraikuntza-prozesuak erdiko lerroaren desbideratzea gertutik kontrolatzea eskatzen du. 2 cm-tik gorakoa bada, zuzendu egin behar da (alboko gidaritzapean). Putz-up prozesuan, zuzenketa kopurua oso txikia da. Hogeita hamar bultzadetan bakar bat edo bi aldiz (15 m-ko kaxa-habea). Hau faktore objektibo askoren emaitza konbinatutzat har daiteke, zeren eta makineria hidraulikoari dagokionez, olio-ponpak fluxu-errorea duelako, jackak barne-ihes arazoak dituelako (jack bakoitza ezberdina da eta pistoia posizio desberdinetan egon daiteke). ), eta sistema barruan beste gailu batzuen ihesa, etab., aurreko gure ondorioarekin kontraesanean ez dagoena.
3. Jack bertikalen sinkronizazioa. Gure jack bertikalak lau jack dituen ponpa baten bidez funtzionatzen du, eta sinkronizazio-balbula bat ezarri behar da, sinkronizazio-balbulak (edo desbideratzaile-balbulak) hainbat jack egin ditzakeelako karga ezberdinetan (erresistentzia) oraindik aurrez zehaztutako proportzioa edo olio-hornidura berdina lortzeko. sinkronizazioa. Baina balbula sinkronizatzaile batek bi irteera baino ez dituela kontuan izanda. Sistemaren egitura sinplifikatzeko, ez da sinkronizazio balbularik instalatzen. Kutxa-habearen ezkerreko eta eskuineko pisuak simetrikoak direla kontuan hartuta, ez da arazo handirik hori egitea. Praktikak frogatu du estimazioa zuzena dela, jack bertikala, funtsean, sinkronoki igotzen eta jaisten dela, eta ez dago arazorik habea altxatzeko eta erortzeko.
Argitalpenaren ordua: 2022-05-16